六部工坊启智CV机器人
立即咨询
 首页
首页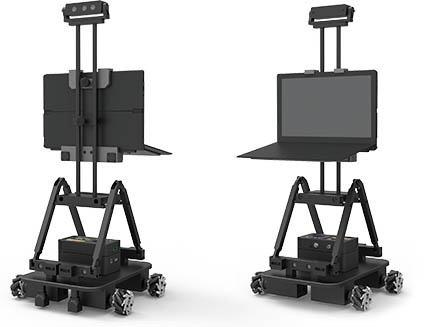
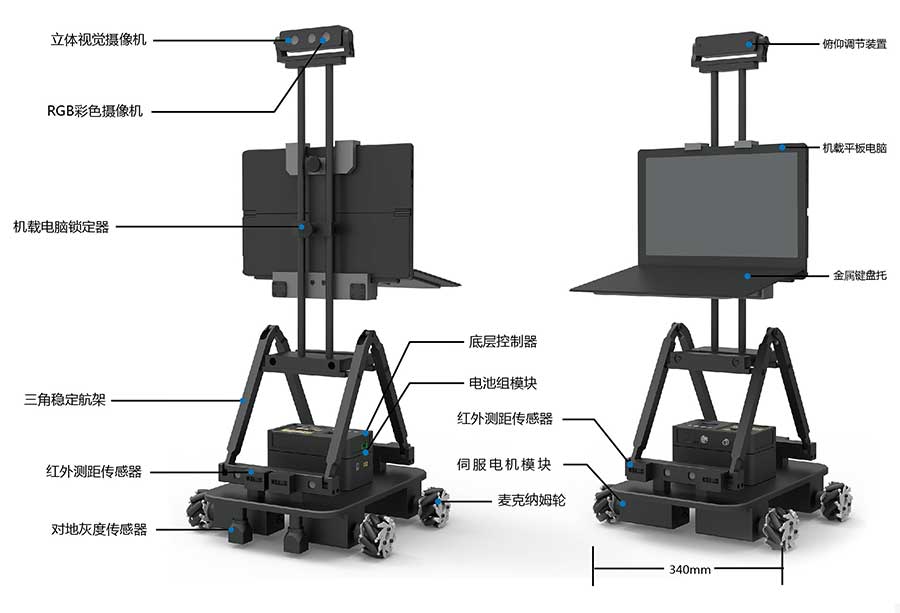
整机参数

产品特性
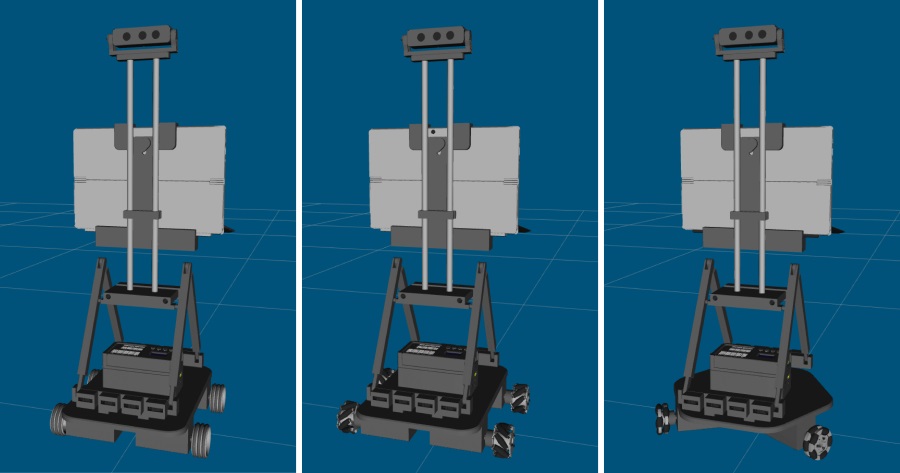
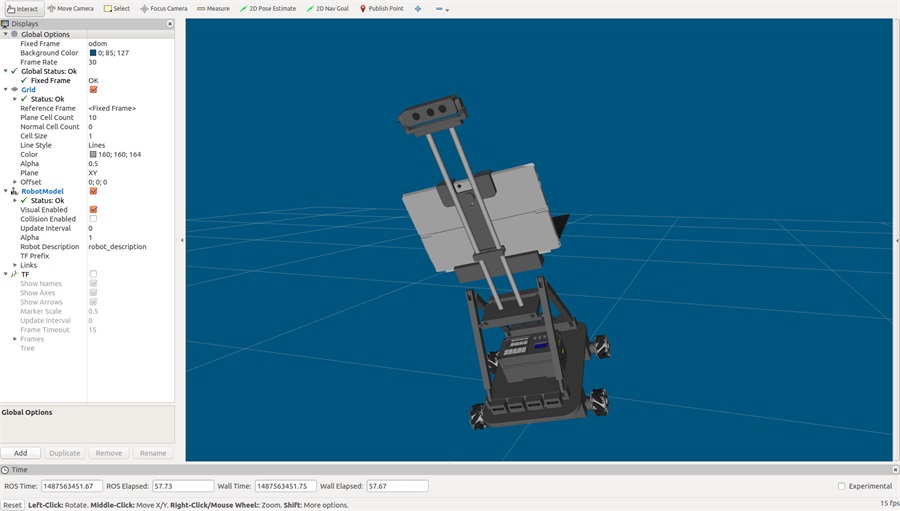
1. URDF模型描述——启智CV机器人运行ROS操作系统,三种底盘构型都具备完整的URDF模型描述,可以
在ROS系统里直接加载和扩展。

2. 电机码盘里程计——启智CV机器人装备了带编码器的直流伺服电机,可以在ROS里获取电机码盘
计数,从而推算出机器人的移动里程信息。
3. IMU姿态传感——启智CV版内置了一枚六轴的IMU单元,可以在ROS中实时获取机器人的
滚转、倾斜和朝向信息,为上层控制算法提供数值依据。
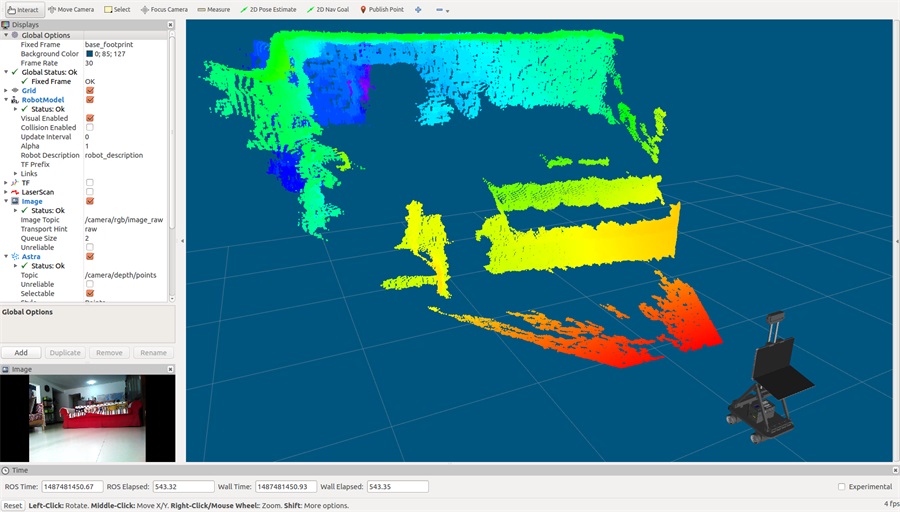
4. 三维立体视觉——启智CV版装备了RGBD立体相机,能够探测视野范围
内的立体信息并实时生成三维点云。
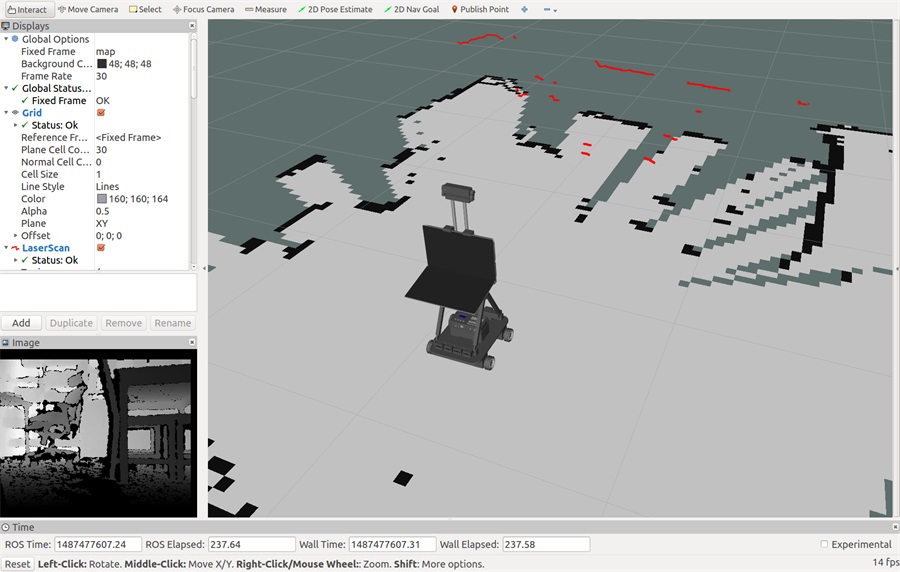
5. SLAM环境建图——启智CV版使用DepthToScan技术将三维立体点云进行
降维SLAM,从而构建出可以进行定位导航的二维平面地图。
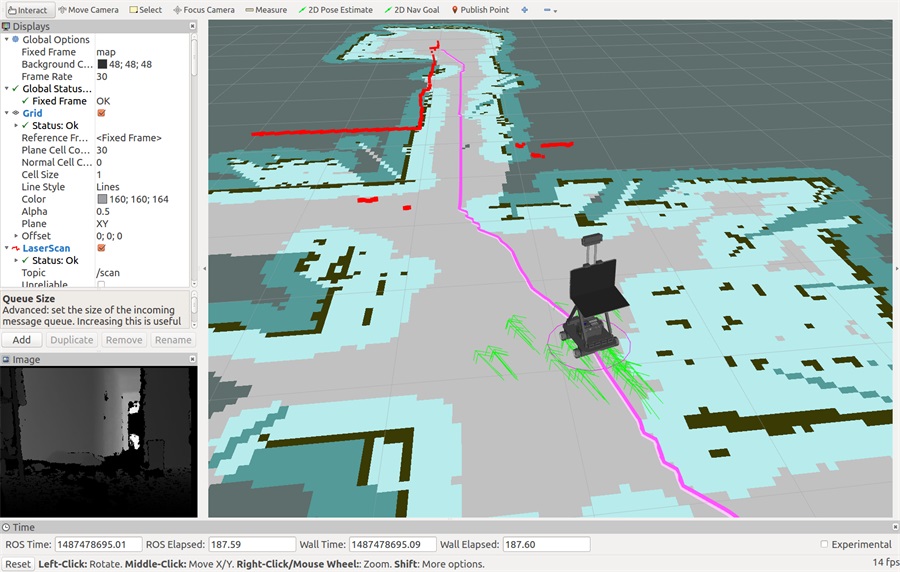
6. 自主定位导航——启智CV版将传感器获取的三维点云信息与电机里程计数据
进行融合,在构建好的地图里进行定位和自主导航。
产品推荐

织元 Zmetaboard 数字孪生可视化平台,集成三维孪生大屏快速生成工具与低代码数字孪生开发平台功能。作为新一代平台,可通过低代码工具快速搭建企业级数据看板,带来突破性的产品营销和数据分析体验,适配多场景可视化需求。

晨科LIMS实验室信息管理系统,功能强大,全方位满足检测管理所需。灵活适应各类实验室信息化管理需求,支持各类高校实验室、科研实验室、第三方检测公司实验室、生物医药化工企业研发实验室等。

易泰电子化工安全生产智能管理系统以风险分级管控与隐患排查治理两道防线为核心,构建一图、两单、三卡,以线上线下相结合的信息化手段,及时、全面的获取企业的风险隐患数据并对其管控,以风险分级管控带动巡检任务,以巡查结果驱动隐患治理,以隐患治理情况反推风险管控效果,有效降低事故危害。

杭州华望M-Design系统建模软件,整合SysML建模工具、多图表建模平台及AI辅助建模平台功能。支持多维度系统图表构建、智能建模辅助及模型关联分析,助力高效完成系统设计,提升建模精准度与工作效率。
数字化社区
视频
文章