






六部工坊 启智ROS机器人
立即咨询
 首页
首页 启智ROS机器人
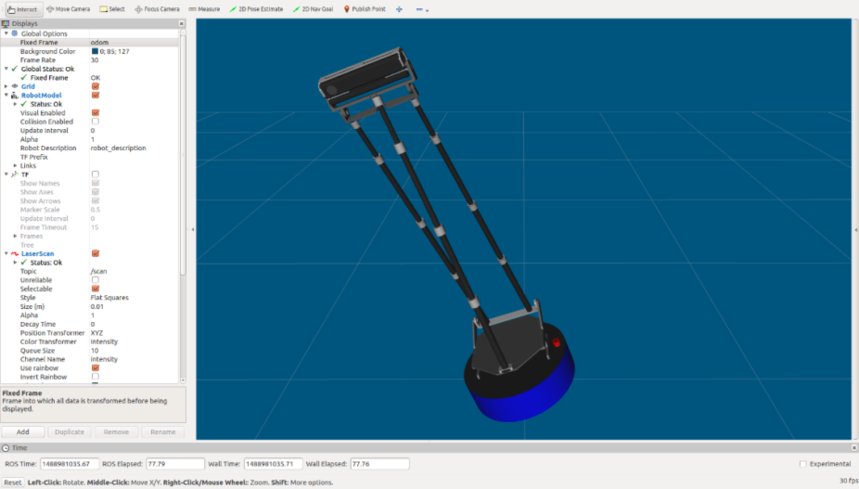
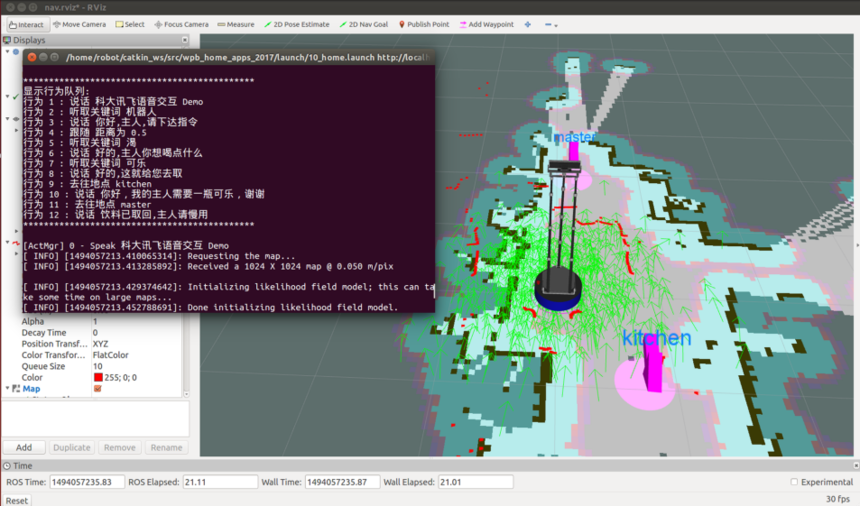
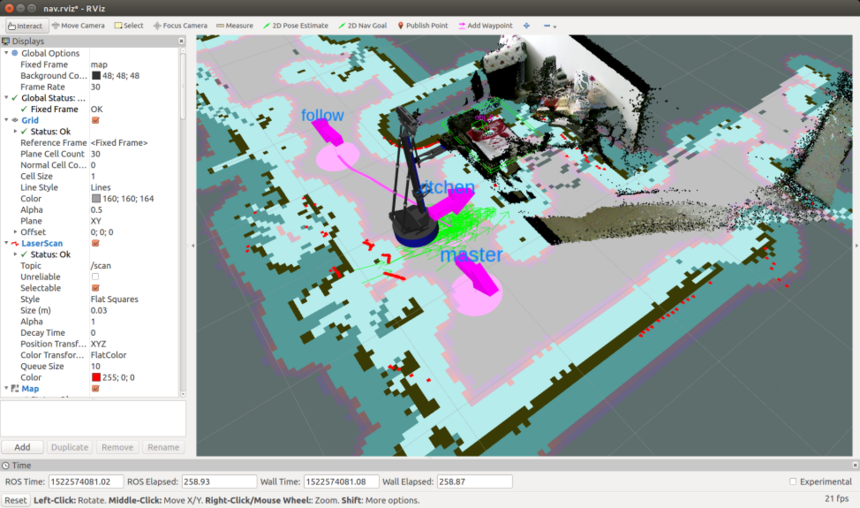
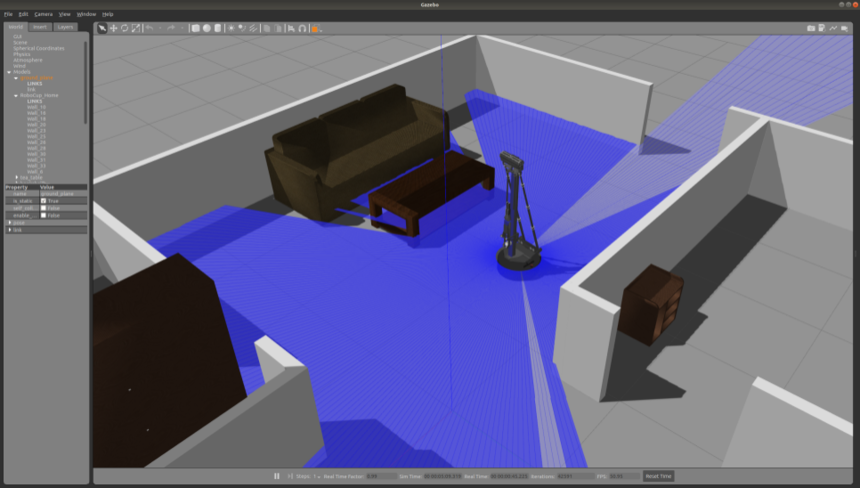
启智ROS机器人启智ROS机器人是一款为ROS机器人算法开发量身打造的机器人平台,拥有硬件里程计、激光测距雷达、立体视觉相机和语音输入输出阵列等一系列硬件配置,完美适配ROS的TF、Navigation^ Actionlib和Pluginlib子系统,是深入学习ROS和开发验证高级机器人算法的理想平台。
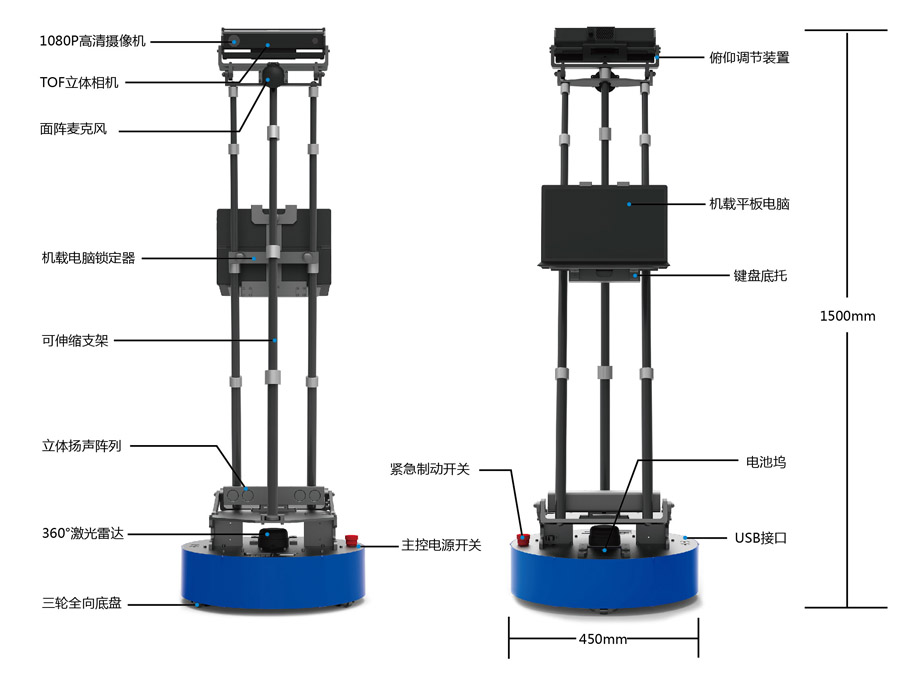
机械结构
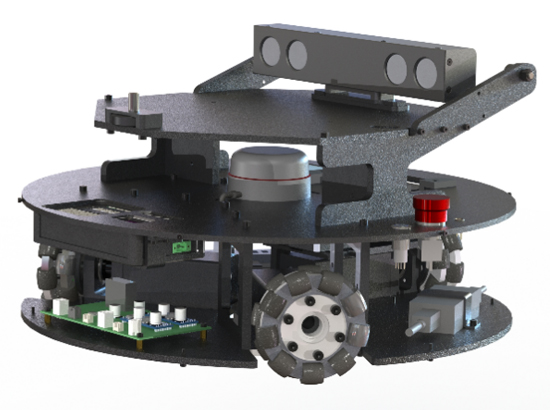

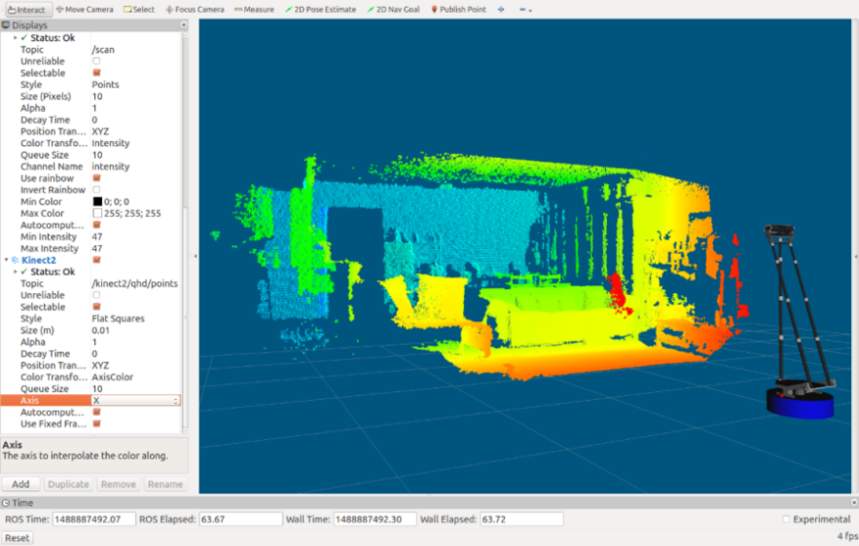
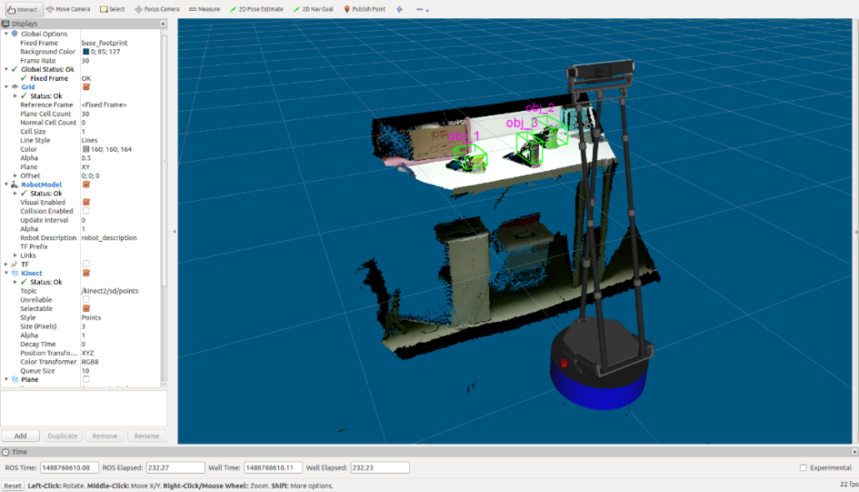
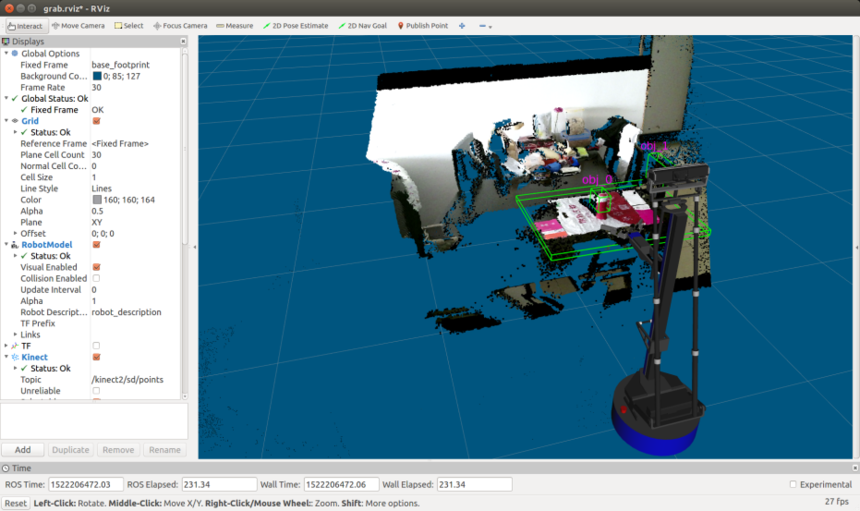
 传感器
传感器

 整机参数
整机参数
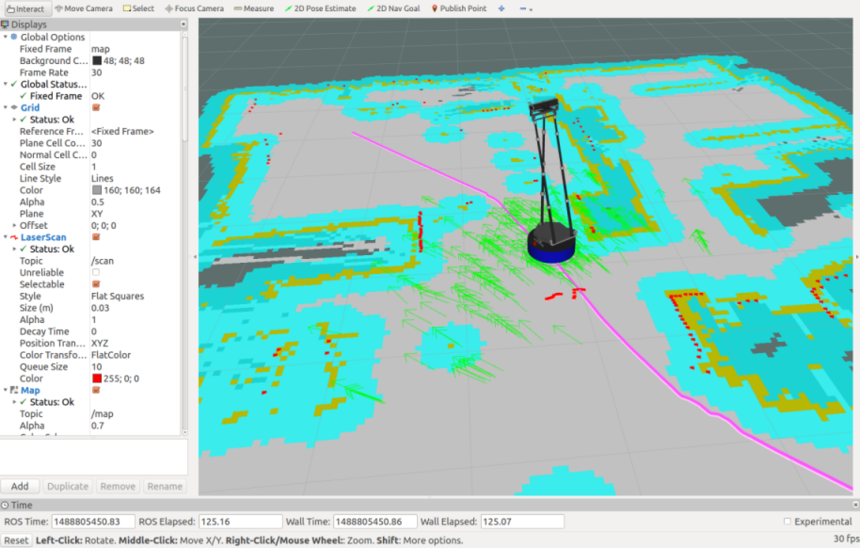
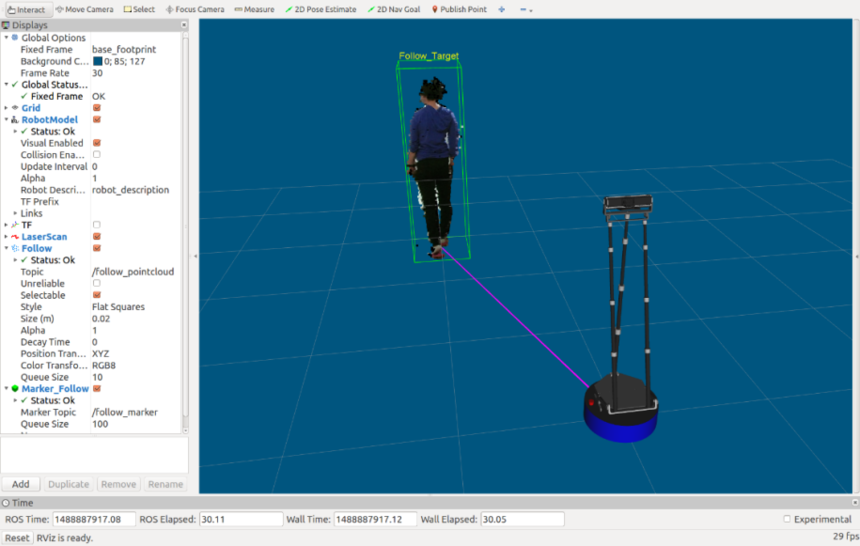
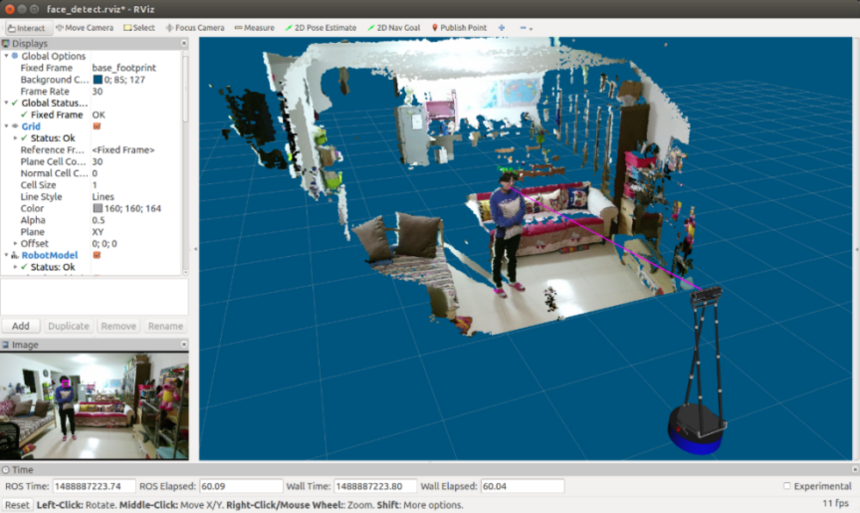
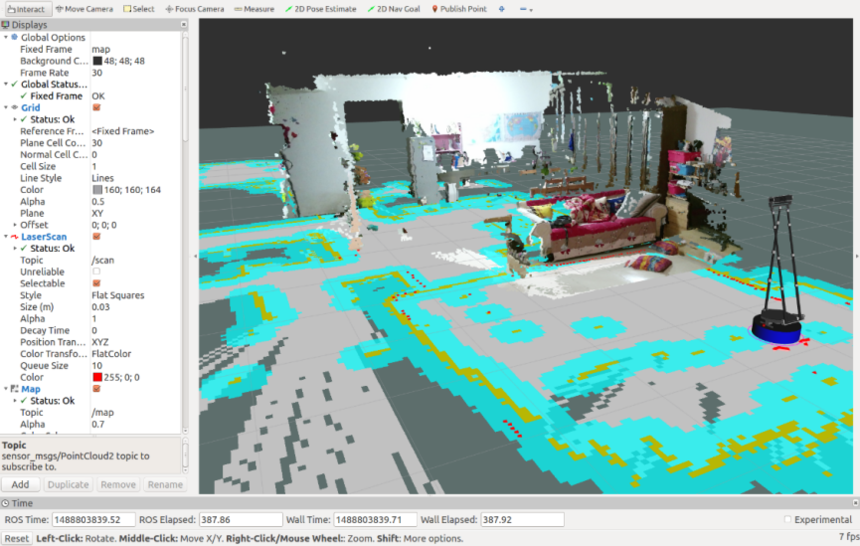
软件特性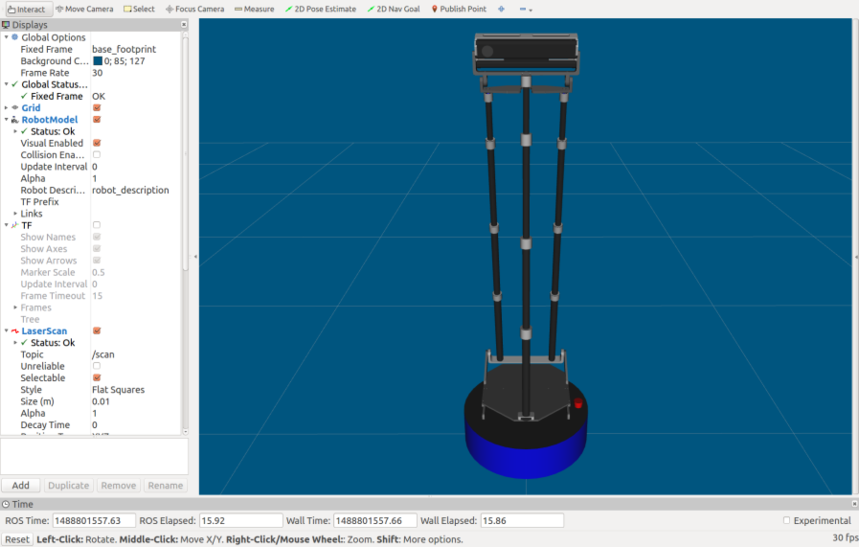


 教学资源
教学资源启智ROS机器人配备实验指导书,设计了16个课程实验,所有实验均进行了详细实验步骤图文描述,方便用户老师进行课程编排。
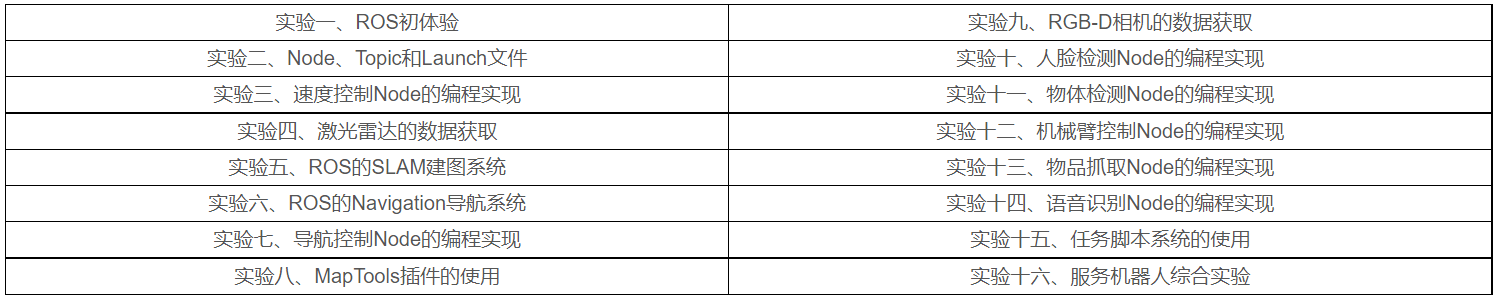
产品附赠所有实验的参考课件PPT,助力老师快速开课。
产品推荐

热浪数据全链路社交电商数据分析平台,从营销链路出发,以数据为支撑协同服务,赋能品牌社媒数字化营销。致力于以大数据技术及算法模型为支持,为企业提供社媒营销深度且全面的数据化解决方案,助力用户实现「精」「营」的品效协同增长。

商屋教育服务行业社群运营解决方案,产业链、供应链、上下游链接,商机匹配,基于供需的资源对接,实时的资讯、市场活动等。 基于工商信息和个人身份认证下的实名制规则为基础信任背书,企业直接在线实时的互动交流 。

ONLYOFFICE文档管理系统,在线编辑器,处理文档、电子表格、演示文稿、可填写的表单及 PDF 文件。全套编辑和格式管理工具,各种操作,处理字体和样式、设置段落和文本格式。创建在线表单,数字化填写。

ABC诊所管家中医诊所管理系统,现场预约可由工作人员在系统中完成,也可由患者通过自助服务机或门店二维码自助完成。不受地域和时间影响,是最方便的预约方式。患者关注诊所的微信公众号后,进入预约页面,选择医生和对应班次,预约并支付,即可完成预约。
数字化社区
视频
文章



