






六部工坊启程3智能移动机器人
立即咨询
 首页
首页
启程3为各类室内机器人应用提供一个稳定可靠的底盘基础,适合用户在平台上扩展自己的任务载荷。使用户的主要精力从繁琐的底盘设计制造工作中解放出来,专注于业务本身的功能实现,从而大大加速整个应用的开发进度,尽早为用户带来效益。
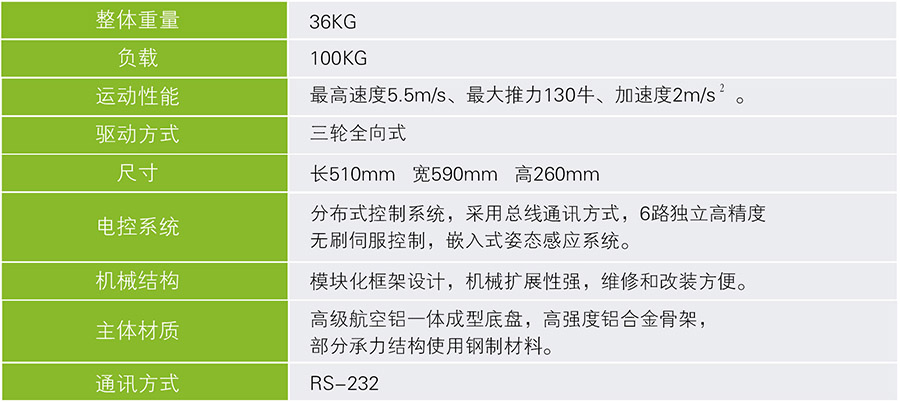
整机参数
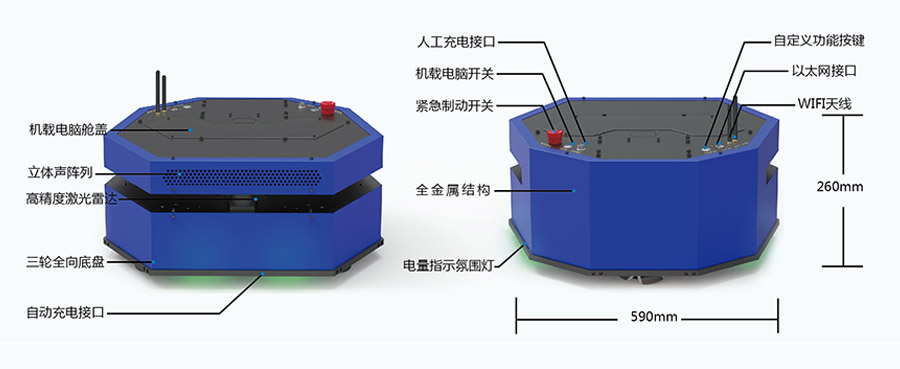
主控电脑

运动底盘模块
视觉模块(选配)

激光雷达

控制电路

电源

产品特性

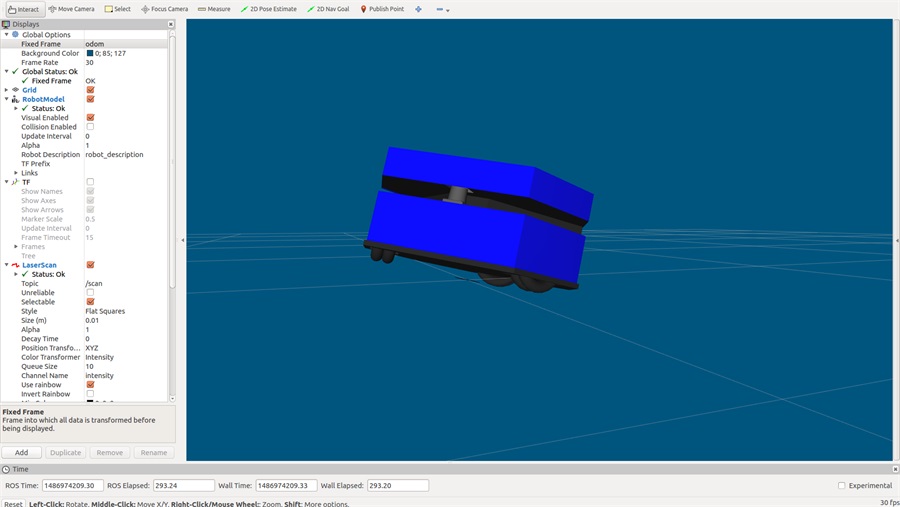
1. URDF模型描述——启程3运行ROS操作系统,具备完整的URDF
模型描述,可以在ROS系统里直接加载和扩展。

2. 电机码盘里程计——启程3装备了带编码器的直流伺服电机,可以在ROS里接收
电机码盘计数,从而推算出机器人的移动里程信息。
3. IMU姿态传感——启程3内置了一枚六轴的IMU单元,可以实时获取机器人的姿态信息,为
机器人的上层控制算法提供数值依据。
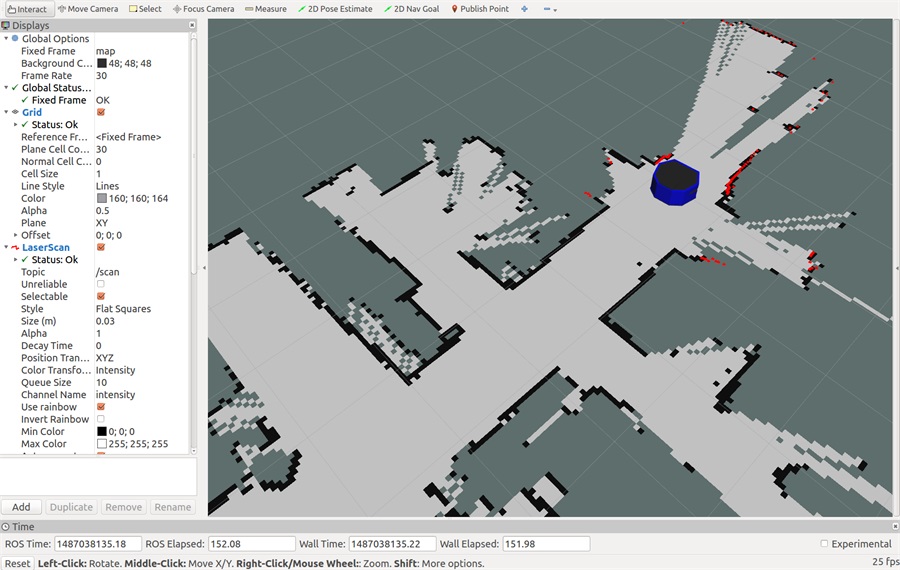
4. SLAM环境建图——启程3装备了一枚国外进口的高精度激光雷达,可以实时扫描机器人周围的障碍物分布状况,借助
HectorSLAM和GMapping算法,创建环境地图。

5. 自主定位导航——启程3将激光雷达扫描的距离信息与电机里程计数据进行融合,使用AMCL方法进行
地图定位,结合ROS里的move_base进行自主导航。
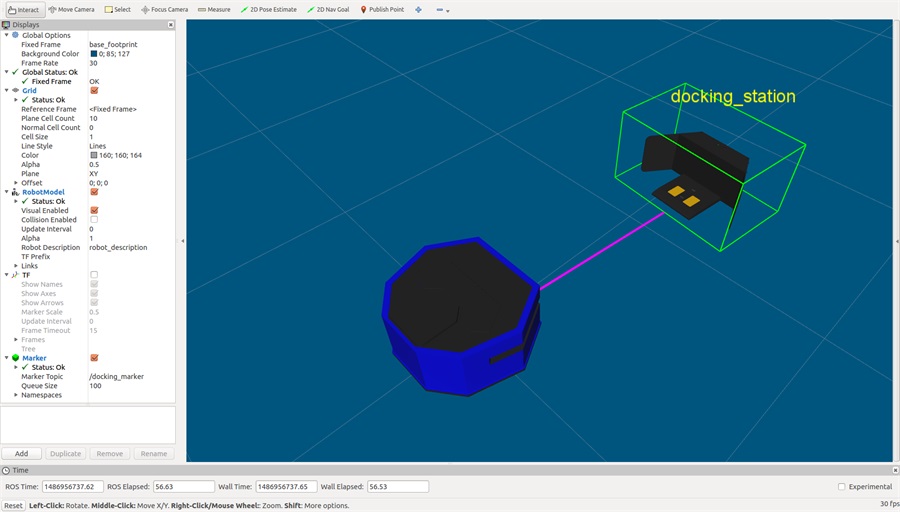
6. 自主充电——启程3可以在周围搜索其专属的充电装置,自主引导进入充电坞进行充电。
封装为单个独立的行为单元,通过自由组合实现复杂的任务流程。
合成,方便个性化定制
产品推荐

雄伟科技自助称重数字食堂解决方案以自助称重结算系统为核心,按克计费,精准结算。融入智慧食堂管理平台,实现就餐数据统计、精准备餐。为企业、学校等打造便捷、节约、高效的就餐新体验,引领食堂管理新风尚 。

帆软SFE医药营销效能分析解决方案大到生产、人事、财务、销售管理,小到统计、预约、订餐、日报、 进度查询等场景,简道云都能提供相应解决方案。业务人员通过简单学习,即可清楚了解简道云可以做什么,不会出现 “乱指挥”的情况。开发成本低:零代码、几小时就能搭建简单应用,人力/时间成本低 维护成本低:系统稳定性由简道云保障,业务人员也能自行维护。

若邻云诊所,专业诊所管理软件解决方案,涵盖专科、中医、儿科及综合门诊等多场景管理系统。提供专属定制化服务,深度融合医药管理、用户服务与诊所经营需求,实现患者建档、诊疗开方、药品管理及运营数据分析全流程数字化。适配各类门诊业态,是懂医药业务、懂用户需求、更懂诊所经营的智能化管理软件平台。
McAfee Network Security Platform 以前沿的硬件平台为依托,采用能够对多种产品提供的数据加以利用的 Security Connected 方案,可以为对于入侵防护和监控具有超高要求的组织保驾护航。
数字化社区
视频
文章



