蓝巨人AGV智能仓解决方案
 首页
首页 原料仓,半成品仓WMS管理
原料仓,半成品仓WMS管理

智能仓改造达到效果
收货流程1.同步ERP来料单,收料人选择来料单。例如系统判断来料单重量大于50KG批次原料潜入式由4楼取空托盘到1楼地磅,如批次都小于50KG则取移动料架到1楼地磅。
2.1楼地磅记录当前车+载具重量,行驶到收料位放下载具。由人员将辫发放入料箱或托盘。使用PDA确认来料单。
3.潜入式AGV机器人将载具移动到1楼地磅记录总重量,减去之前空车称重计算本次入库批次重量。比对来料单重量。
4.比对来料单重量与称重重量如一致则进入电梯上4楼仓库。如不一致则原地报警等待人工处理。
 入库流程
入库流程1.潜入式从1楼将载具通过电梯移动到4楼。如托盘物料话直接由潜入式送到货位底部摆放。系统记账
2.移动料架载具由潜入式放到对应等待位,潜入式AGV回待命位。呼叫CTU机器人取料。
3. CTU机器人从料架取箱送到CTU货位存放记账。
4.入库动作完成后,由CTU机器人从货位取出空箱送到移动料架。移动料架等待下次使用。
 出库流程
出库流程1.打通MES工单,拉发车间员工使用PDA选择工单要料,系统根据所需物料批次自动4楼库内取对应批次物料
2.托盘物料直接由潜入式到货位取托盘,料箱批次物料先由潜入式将空移动料架送到等待位,由CTU取出对应批次料箱送到料架。
3.潜入式AGV将对应批次物料,送到拉发车间门口。由工人将物料取走,PDA确认。
4.AGV将空载具退回原材料库。CTU将空料箱取回放回货架。
 潜入式搬运机器人
潜入式搬运机器人

最大载重:300KG
使用场景:产线配送、搬运作业
实现厂内“智慧物流”和仓储中心“货到人选”多班制,全天24小时运行
产品特点:
激光SLAM雷达导航,自动快速充电,支持24H小时作业
承载面积大,应用范围广,行驶通道宽度小,非常适用于轻小型原材料配送与工位半成品搬运流转
全方位多重安全防护,确保人、车、物安全
潜入式移动货架
 库存实时看板
库存实时看板
 安全库存预警
安全库存预警
半成品CTU料箱库物流自动化,智能化。改变现有人工仓储管理搬运作业。AGV自动执行,降低劳动强度。保证账实相符
 达到效果
达到效果
CTU出入库搬运CTU配合智能分拣台,可以构建小件智能物料库,拣配库,预配库,大大降低操作工作量实现物料移动人不动。实现仓内作业无人化,实现现场作业自动ERP,WMS记账。充分保证账实相符,先进先出。
 U型输送线-智能分拣台
U型输送线-智能分拣台
 智能分拣台位介绍
智能分拣台位介绍
描点自动识别货物,驱动智能屏、传送带作业。同时对
回货做验证扫描,确定入库货位驱动AGV
自动打印
减少人工清单工作量
集配作业工装
 场景一、物料分拣入库流程
场景一、物料分拣入库流程1.同步上层系统到货单,与到货单明细。智能屏上选择本次要入库的到货单,点击启动触发机器人自动匹配智能仓系统物料库存,根据并不并箱匹配物料+批次查找是否有对应库存料箱取出,不并箱则取出一个空料箱。
2.机器人移动到分拣台,将料箱放到入料口触发激光感应器后向左滚动,将料箱传送到人工分拣位,每次将机器人背负所有料箱全部放下。
3.料箱传送到人工分拣位触发激光感应,智能屏提示本次需放入料箱物料编码、名称、数量,人工按照智能屏幕提示放入物料。放入数量根据智能秤称重计算。放入完毕扫描料箱码确认装箱完成,人工将料箱推入对面回料传送带。
4.回料传送带触发激光感应,传送料箱向右到达回料口,自动生成机器人取箱任务。机器人取箱完成后将料箱放回原货位
 场景二、物料纸箱直接入库流程
场景二、物料纸箱直接入库流程1.同步上层系统到货单,与到货单明细。智能屏上选择本次要入库的到货单,点击启动选择纸箱整箱入库
2.自动扫描纸箱标签吗,确认货物信息(编码、名称、数量、批次、生产日期、供应商等)。
4.回料传送带触发激光感应,传送料箱向右到达回料口,自动生成机器人取箱任务。机器人取箱完成后将料箱放回原货位
 场景三、物料出库流程
场景三、物料出库流程1.同步上层系统到货单,与到货单明细。智能屏上选择本次要入库的到货单,点击启动选择纸箱整箱入库
2.自动扫描纸箱标签吗,确认货物信息(编码、名称、数量、批次、生产日期、供应商等)。
4.回料传送带触发激光感应,传送料箱向右到达回料口,自动生成机器人取箱任务。机器人取箱完成后将料箱放回原货位
 每日自动盘点
每日自动盘点1. 每日下班后生成盘点称重任务,系统筛选出当日未出入库料箱清单。CTU1小时可盘点40~50箱,按每晚自动工作8小时计,每天约可盘点400箱
2. CTU自动取箱,行驶到称重位放下料箱,记录实际称重重量。
3.系统自动比对箱位重量与系统库存是否一致,更新箱位库存并原箱退回。
4.盘点完成后生成每日盘点差异表,异常重量料箱经系统推送给库管人员。
 物料入库界面
物料入库界面智能操作屏到货入库功能,显示到货清单信息。选贼对应的到货单点击入库进入明细界面
 物料入库界面
物料入库界面展示本次清点物料信息,点击启动选择箱子类型、运输方式。驱动机器人按顺序取料箱送达进料口,人工分拣后机器人将料箱入库
 CTU50 料箱机器人
CTU50 料箱机器人CTU机器人,构建小件智能仓,高效,无人,真正满足仓储先进先出,批次管理,安全库存管理,单车1小时30-40箱出入,物料分拣料动人不动。
 库存实时重量
库存实时重量货位实时看板,清晰体现货架每层货位上货物信息与实时重量,同时体现安全库存量,低于安全库存量的货位标红预警
 库存历史重量
库存历史重量货架分时记录查看,按设定间隔时间回查货架存放重量记录
 智能仓管理
智能仓管理
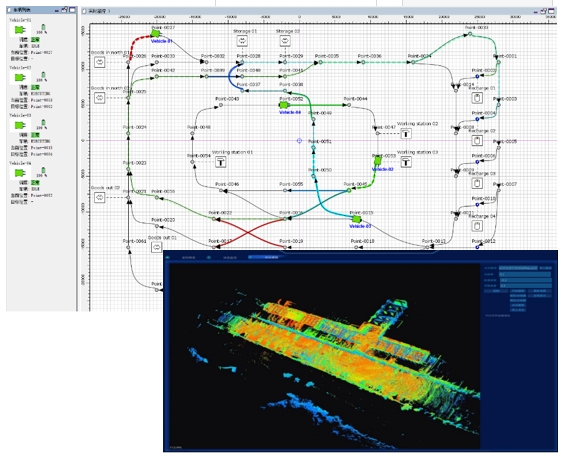
AGV监控全景图
 手机端仓储数据监控
手机端仓储数据监控实时库存监控、资金占比监控、高低库存预警、超期物料监控、临期物料管控、月周转率分析
 物流-原料,外购件,成品WMS管理
物流-原料,外购件,成品WMS管理WMS系统(Warehouse Management System)是一个实时的计算机软件系统,用于对仓库、物流中心等场所的货物进行管理
 物流- WCS仓储控制系统
物流- WCS仓储控制系统WCS仓库控制系统(Warehouse Control System)为广泛的物料处理设备提供统一的接口,如AGV、传送带、传送系统、电梯、分拣机、码垛机等。它位于WMS(仓库管理系统)与物流设备之间的中间层,负责协调、调度底层的各种物流设备。

物流-AGV多机调度管理系统1.设备接入:可接入和管理不同类型的AGV设备,实现不同类型AGV设备协同工作。
2. 任务管理:根据设定的优先级和条件,将任务分配给不同的AGV。根据货物的紧急程度、目标位置、目标时间等因素,系统确保任务被及时分配给适当的AGV。
3. 路径规划:基于地图和环境信息,对AGV的行驶路线进行规划。它考虑到路径的长度、交通状况、障碍物等因素,并通过智能算法选择最佳的路径,以减少行驶时间和能量消耗。
4. 资源调度:根据AGV的状态和任务需求,动态管理AGV车队的资源分配。它可以确定哪些AGV处于可用状态,哪些AGV需要充电或维修,以及如何调度AGV以最大限度地利用资源。
5. 实时监控:实时监控AGV的位置、速度、状态和执行任务的情况。通过传感器和监控设备,系统能够准确地跟踪AGV的动态信息,并提供可视化界面以供操作人员实时监控。
6. 协调与优化:系统能够协调多个AGV之间的合作和冲突避免,确保它们能够高效地共同工作。它还可以利用算法和优化技术,对AGV的调度进行优化,以提高整体的运输效率和质量。
7. 数据分析与优化:系统可以收集、分析和存储AGV运行的数据,包括运输时间、路线选择、任务完成率等指标。通过对这些数据的分析和挖掘,系统可以提供有关AGV运行性能和调度效果的反馈和改进建议。
 系统架构
系统架构
产品推荐